5. Configuring ROS Domain ID and Firewall
Typically ROS2 domain id is configured by setting environment variable ROS_DOMAIN_ID before starting node. On UR OS there is a need for centralized management of domain id, since there are many dockerized nodes that expect to seamlessly communicate with each other.
UR limits available domain ids to 0-5 inclusive. By default domain id is set to 0. To be able to make ROS2 visible externally, ROS2 toggle button must be enabled in the screen, which is Settings->Security->Services, below:
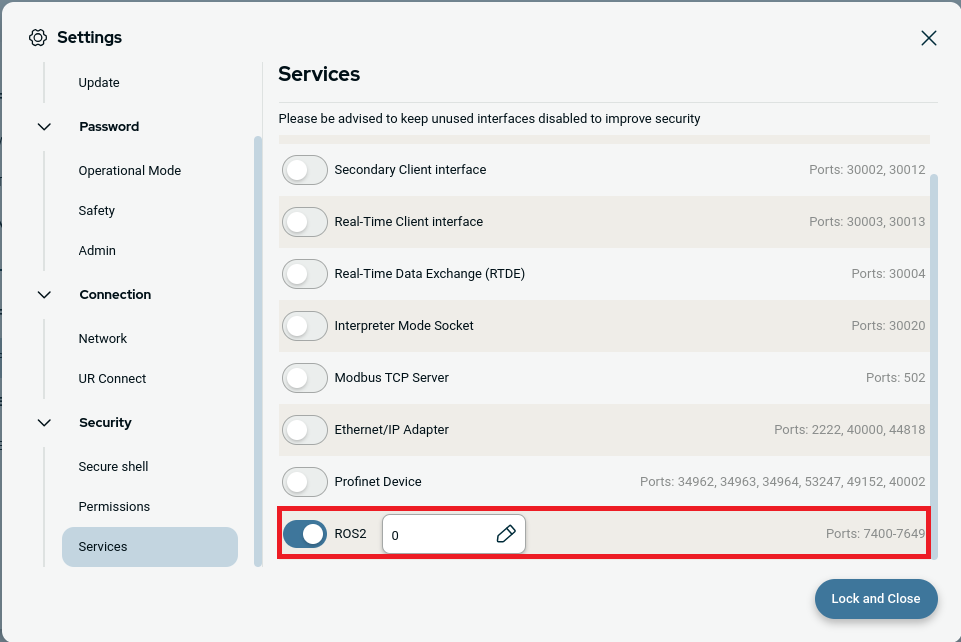
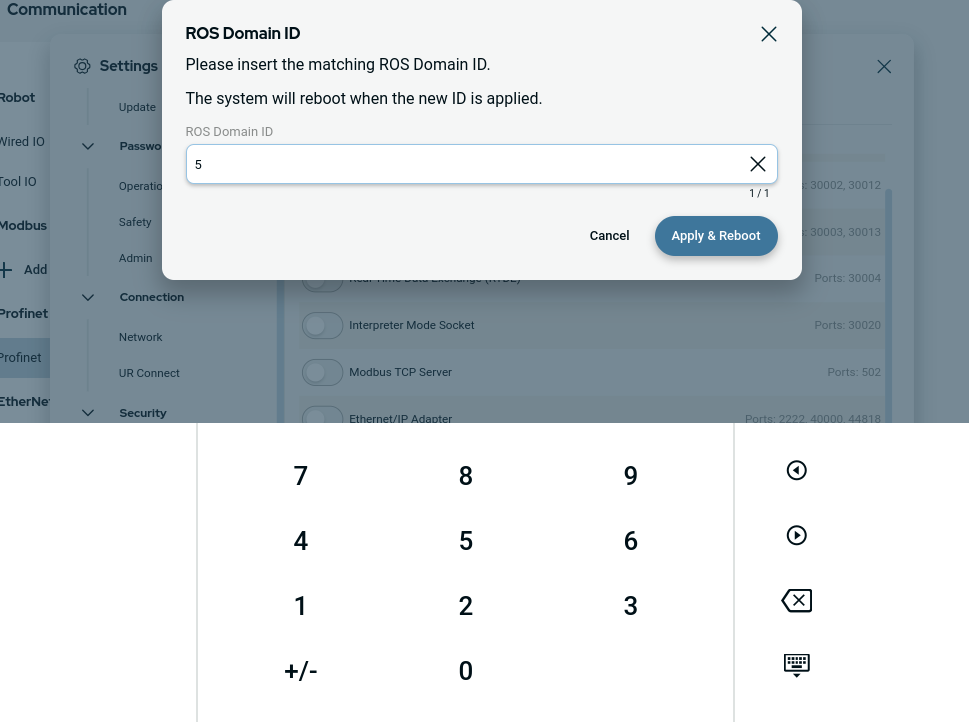
Once the input box is clicked next to ROS2 toggle button, a pop up window will be visible like below. Then a desired ROS_DOMAIN_ID, for example 5, can be set. Applying a new ROS_DOMAIN_ID requires a reboot of the robot:
Disabling ROS2 will just disable external visibility and accessibility of the robot via ROS network. After disabling this service, the robot will still have ROS2 functionality internally.
Note
Robot needs to be restarted before changes take effect.