You're reading the documentation for an obsolete version. For the latest released version, please have a look at mp1.5.
World Model
Script Functions
get_pose
get_pose(name, rel_frame="base", ref_frame=rel_frame)
Get the pose of the name frame relative to the rel_frame frame but expressed in the coordinates of the ref_frame frame. If ref_frame is not provided, then this returns the pose of the name frame relative to and expressed in the same frame as rel_frame.
This will fail if any arguments are not an existing frame.
If being used with the part positioner product, all three arguments can also be the names of external axes or axis groups.
Arguments
name: name of the frame to query.
rel_frame: short for “relative frame” is the frame where the pose is computed relative to
ref_frame: short for “reference frame” is the frame to express the coordinates of resulting relative pose in. If this is not provided, then it will default to match the value of rel_frame.
Return
The pose of the frame expressed in the ref_frame coordinates.
Example
Here is an example URScript:
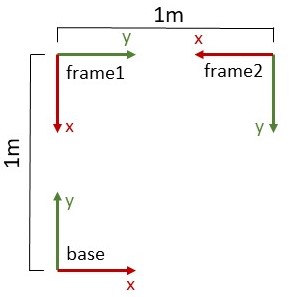
# place the first frame 1m up in the "base" y axis and rotated -90 degrees around the "base" z axis.
add_frame("frame1", p[0, 1, 0, 0, 0, -pi/2], "base")
# place the second frame 1m in the "base" y axis, 1m in the "base" x axis and rotated -pi radians around the "base" z axis.
add_frame("frame2", p[1, 1, 0, 0, 0, -pi], "base")
# get the pose of frame2 relative to "frame1" and expressed in the "frame1" coordinates the return value is
# p[0, 1, 0, 0, 0, -pi/2] meaning that "frame2" is 1m in the "frame1" y axis and is rotated by -pi/2 radians about the "frame1"
# z axis.
p1to2in1 = get_pose("frame2", "frame1", "frame1")
# Get the pose of frame2 relative to frame1 but expressed in the coordinates of the "base" frame. The return value
# is p[1, 0, 0, 0, 0, -pi/2] meaning that "frame2" is 1m in the "base" frame x axis relative to "frame1" and is rotated
# -pi/2 radians in the "base" frame z axis relative to "frame1".
p1to2inbase = get_pose("frame2", "frame1", "base")
Here is a diagram that illustrates the frames in the prior example.
convert_pose
convert_pose(pose, from_frame, to_frame)
Convert pose from from_frame to to_frame.
This will fail if either coordinate system argument is not an existing frame.
If being used with the part positioner product, all three arguments can also be the names of external axes or axis groups.
Arguments:
pose: pose to be converted
from_frame: name of reference frame at origin of old coordinate system
to_frame: name of reference frame at origin of new coordinate system
Return
Value of pose expressed in the coordinates of to_frame.
reset_world_model
Delete all frames, axis groups, and axes that were added to the world model. This also moves the robot’s base to the world origin.
add_frame
add_frame(name, pose, ref_frame="base")
Add a frame with the name name initialized at the specified pose expressed in the ref_frame coordinate frame. This command only adds a frame to the world, it does not attach it to the ref_frame coordinate frame. Use attach_frame() to attach the newly added frame to ref_frame if desired.
If being used with the part positioner product, the ref_frame argument can be the name of an external axis or axis group.
Arguments:
name: name of the frame to be added. The name must not be the same as any existing world model object (frame, axis, or axis group), otherwise an exception is thrown
pose: initial pose of the new object
ref_frame: name of the world model object whose coordinate frame the pose is expressed in. If nothing is provided here, the default is the robot “base” frame.
is_frame
is_frame(name)
Queries for the existence of a frame by the given name.
Arguments:
name: name of the frame to be queried.
Return: Returns true if there is a frame by the given name, false if not.
Example Commands:
add_frame(“frame1”, p[0.2, 0.3, 0.1, 0, 0, 3.14])
is_frame(“frame1”) # true
is_frame(“frame99”) # false
attach_frame
attach_frame(child, parent)
Attaches the child frame to the parent world model object. The relative transform between the parent and child will be set such that the child does not move in the world when the attachment occurs.
The child cannot be “world”, “tcp”, or the same as parent.
This will fail if child or parent is not an existing frame, or this makes the attachments form a closed chain.
If being used with the part positioner product, the parent argument can be the name of an external axis or axis group.
Arguments:
child: name of the frame to be attached. The name must not be “world” or “tcp”.
parent: name of the object that the child frame will be attached to.
Return: n/a
delete_all_frames
delete_all_frames()
Delete all frames that have been added to the world model.
The “world”, “base”, and “tcp” frames cannot be deleted.
Any frames that are attached to the deleted frames will be attached to the “world” frame with new frame offsets set such that the detached frames do not move in the world.
delete_frame
delete_frame(name)
Delete the frame named frame from the world model.
The “world”, “base”, and “tcp” frames cannot be deleted.
Any frames that are attached to the deleted frame will be attached to the “world” frame with new frame offsets set such that the detached frame does not move in the world.
This command will fail if the frame does not exist.
Arguments:
name: name of the frame to be deleted
get_frame_parent
get_frame_parent(name)
Get the parent of the frame named name in the world model.
If the frame is not attached to another frame, then “world” is the parent.
Arguments:
name*:* the frame being queried
Return
name of the parent as a string
move_frame
move_frame(name, pose, ref_name)
Changes the placement of the coordinate frame named name to the new placement given by pose that is defined in the ref_name coordinate frame.
This will fail if name is “world”, “tcp”, or if the frame does not exist. Note: to move the “tcp” frame, use the set_tcp() command instead.
If being used with the part positioner product, the ref_name argument can be the name of an external axis or axis group.
Limitations: if used in conjunction with external axis and frame tracking, the move_frame() call will throw an exception and fail if the following is true: the frame being tracked is attached to the moving axis and the call to move_frame will change the tracked frame’s pose. This can occur if move_frame() is invoked on the tracked frame, or if the tracked frame is attached to another on which move_frame() is invoked. Here is an example of when move_frame would fail:
axis_group_add(“PartPositioner”, p[x,x,x,x,x,x]) # adds an axis group
axis_group_add_axis(“PartPositioner”, axis_name=“Axis1”, parent_name=“”, pose=p[x,x,x,x,x,x], type=0, v_limit=1, a_limit=1, q_limits=[-1,1]) # add first axis
add_frame("AttachedFrame", p[0,0,0,0,0,0]) # add a new frame coincident with the robot base
attach_frame("AttachedFrame", "Axis1"), # attach the frame to the axis
frame_tracking_enable("AttachedFrame")
axis_group_movej("PartPositioner", [1]) # calling move_frame("AttachedFrame",...) during this call would fail
frame_tracking_disable()
Arguments:
name: the name of the frame to move
pose*:* the new placement
ref_name: the coordinate frame that pose is expressed in. The default value is the robot’s “base” frame.
Example Commands:
*move_frame("frame1", p[0.2, 0.3, 0.1, 0, 0, 3.14])*
*move_frame("frame1", p[0.2, 0.3, 0.1, 0, 0, 3.14], ref_name="frame2")*
get_children
get_children(name)
Returns a list of immediate child object frame names. Parent-child relationships are defined by wold model attachments. If being used with the part positioner product, the child objects may also be an axis-group or an axis.
Arguments:
name: the name of the parent object.
Example Commands:
get_children("world")
# ["base"]
attach_frame("user_frame1", "base")
attach_frame("user_frame2", "user_frame1")
get_children("base")
# ["tcp", "user_frame1"]
Frame Tracking
frame_tracking_enable
frame_tracking_enable(name)
Enable tracking of a given frame in the world model named name.
While enabled, the displacement (from time of enablement) of name is continually measured an used to offset the tcp. This offset is applied to the tcp independent of whether the robot is in motion.
Arguments:
name: Name of the frame in the world model to track.
Example
Here is an example URScript which smoothly traces out a square which is rotating and translating:
Example URScript
global center = p[0.5, 0.0, 0.2, 3.14159, 0, 0]
length = 0.2
l = length / 2
global velocity = 0.005
global delta = velocity / (500)
add_frame("center", center)
add_frame("corner1", p[l, l, 0, 0, 0, 0], "center")
add_frame("corner2", p[-l, l, 0, 0, 0, 0], "center")
add_frame("corner3", p[-l, -l, 0, 0, 0, 0], "center")
add_frame("corner4", p[l, -l, 0, 0, 0, 0], "center")
attach_frame("center", "base")
attach_frame("corner1", "center")
attach_frame("corner2", "center")
attach_frame("corner3", "center")
attach_frame("corner4", "center")
global running = True
thread duration():
steps = 0
while (True):
if (steps > 10000):
running = False
break
end
steps = steps + 1
sync()
end
end
thread tracking():
dy = 0
dz = 0
rz = 0
frame_tracking_enable("center")
while (running):
dy = dy + delta
dz = dz + delta
rz = rz - 12 * delta
newCenter = p[center[0], center[1] + dy, center[2] + dz, center[3], center[4], center[5]]
move_frame("center", newCenter) # translate center within the world
move_frame("center", p[0, 0, 0, 0, 0, rz], "center") # rotate about itself
sync()
end
end
frame_tracking_enable("center")
looping = True
movel("center")
did = run duration()
tid = run tracking()
while (running):
vel = 0.1
movel("corner2", v=vel)
movel("corner3", v=vel)
movel("corner4", v=vel)
movel("corner1", v=vel)
end
frame_tracking_disable()
frame_tracking_disable
frame_tracking_disable()
##.#.##. frame_tracking_disable()
Disables tracking of the frame.
Mass Properties
set_mass_properties
set_mass_properties(frame, m, cog, inertia)
Set mass properties (including mass m, center of gravity cog, and inertia matrix inertia) of the frame.
Arguments:
frame: Name of the frame to set mass properties to
m: Mass (in kg)
cog: Center of Gravity, a vector with three elements [CoGx, CoGy, CoGz] specifying the offset (in meters) from the frame origin.
inertia: Inertia matrix (in kg*m^2), as a vector with six elements [Ixx, Iyy, Izz, Ixy, Ixz, Iyz] with origin in the CoG and the axes aligned with the frame axes
set_payload_from_attached_frames
set_payload_from_attached_frames()
Set the payload based on the attached frames. This will compute the effective mass and inertia from frames on an attachment chain to the TCP and set it as the payload. This is an alternative to manually computing the payload and using set_target_payload.
Changes to Existing URScript Functions
movec - new behavior
movec(pose_via, pose_to, a, v, r, mode)
new behavior added to: In addition to existing behavior, the pose_via and pose_to arguments can now also be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in. The robot will resolve the pose_via and pose_to arguments into the base frame of the robot at the time of the movec call.
Changes to Arguments:
pose_via : target via position. Can now be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in.
pose_to: target end position. Can now be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in.
(All other arguments and their default parameters are unchanged.)
Example Command: using frame name as arguments
add_frame("frame_via", p[0.2, 0.3, 0.1, 0, 0, 3.14])
add_frame("frame_to", p[0.1, 0.1, 0.1, 0, 0, 0])
movec("frame_via", "frame_to") # uses the frame names as via and to arguments*
Example Command: using a struct as arguments
add_frame("ref_frame", p[0.1, 0.1, 0.1, 0, 0, 0])
pose_via_struct = struct(pose=p[0.1, 0, 0, 0, 0, 0], frame="ref_frame")
pose_to_struct = struct(pose=p[0.1, 0.1, 0.1, 0, 0, 0], frame="ref_frame")
movec(pose_via_struct , pose_to_struct) # uses poses defined in the "ref_frame" frame for pose_via and pose_to*
movej - new behavior
movej(goal, a, v, t, r)
In addition to existing behavior, the goal argument can now also be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in. When these new argument types are provided, their pose is resolved to the base frame of the robot at the time of the call and the movej joint angle goal is determined via inverse kinematics.
Changes to Arguments:
goal : target position. Can now be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in.
(All other arguments and their default parameters are unchanged.)
Example Command: using frame name as arguments
add_frame(“frame”, p[0.2, 0.3, 0.1, 0, 0, 3.14])
movej(“frame”) # uses “frame” as the goal argument
Example Command: using a struct as arguments
goal_struct = struct(pose=p[0.1, 0, 0, 0, 0, 0], frame="frame")
movej(goal_struct)
movel - new behavior
movel(goal, a, v, t, r)
In addition to existing behavior, the goal argument can now also be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in. When these new argument types are provided, their pose is resolved to the base frame of the robot at the time of the call and used as the goal waypoint to the movel command.
Changes to Arguments:
goal : target position. Can now be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in.
(All other arguments and their default parameters are unchanged.)
Example Command: using frame name as arguments
add_frame("newframe", p[0.2, 0.3, 0.1, 0, 0, 3.14])
movel("newframe")
Example Command: using a struct as arguments
add_frame("newframe", p[0.2, 0.3, 0.1, 0, 0, 3.14])
goal=struct(pose=p[1,0,0,0,0,0], frame="newframe")
movel(goal)
movep - new behavior
movep(goal, a, v, r)
In addition to existing behavior, the goal argument can now also be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in. When these new argument types are provided, their pose is resolved to the base frame of the robot at the time of the call and used as the goal waypoint to the movep command.
Changes to Arguments:
goal : target position. Can now be provided as a frame, axis, or axis group name or a struct of the form struct(pose=p[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the pose struct element is represented in.
(All other arguments and their default parameters are unchanged.)
Example Command: using frame name as arguments
add_frame("frame", p[0.2, 0.3, 0.1, 0, 0, 3.14])
movep("frame")
Example Command: using a struct as arguments
add_frame("newframe", p[0.2, 0.3, 0.1, 0, 0, 3.14])
goal=struct(pose=p[1,0,0,0,0,0], frame="newframe")
movep(goal)
path_offset_set - new behavior
path_offset_set(offset, type)
The path offset function is now aware of frame tracking external axes when MOTION type is selected and a new type called “WORLD MODEL” has been added.
Changes to Arguments:
type: Specifies how to apply the given offset. Changes to options are:
3 - (MOTION) When used at the same time as frame tracking an external axis (see frame_tracking_enable()), the TCP velocity vector used to compute the motion frame is measured in the tracked frame.
5 - (WORLD MODEL) The offset argument is provided as a struct of the form struct(offset=[…], frame=”…”) where the offset struct element is an array (not a pose) and is defined in the coordinates of the provided reference frame given by the frame struct element. The pose of the frame element is resolved to the base frame of the robot at the time of the call.
(All other arguments and their default parameters are unchanged.)
Example Command:
The following example uses a harmonic wave (cosine) to offset the position of the TCP along the Z-axis of the specified frame named “waypoint” using the WORLD MODEL mode
thread OffsetThread():
while(True):
#2Hz cosine wave with an amplitude of 5mm
global x = 0.005*(cos(p) - 1)
global p = p + 4*3.14159/500
offset_type = 5 # WORLD MODEL mode
path_offset_set(struct(offset=[0, 0, x, 0, 0, 0], frame="waypoint"), offset_type)
sync()
end
end
speedl - new behavior
speedl(xd, a, t, aRot)
The tool speed xd can now be a struct of the form struct(vel=[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the vel struct element is represented in. The pose of the frame element is resolved to the base frame of the robot at the time of the call.
Arguments:
xd: tool speed. The argument can be a struct of the form struct(vel=[…], frame=”…”) where the frame struct element indicates what reference frame, axis, or axis group the vel struct element is represented in.
(All other arguments and their default parameters are unchanged.)
Example Command:
add_frame("newframe", p[0.2, 0.3, 0.1, 0, 0, 3.14])
xd_struct=struct(vel=[1,0,0,0,0,0], frame="newframe")
speedl(xd_struct)