You're reading the documentation for an obsolete version. For the latest released version, please have a look at mp1.5.
MotionPlus Introduction
The MotionPlus product aims to provide a simple and accurate way for customers to integrate external axes with their UR robots. This work is limited to external axes that maneuver a part which the robot is performing some operation on.
This product will enable our customers to create programs that perform coordinated motion with external axis. This is critical for part positioners used in welding, which is our main focus application.
Target Application
This introduction is focused on part positioners for welding applications where the part being welded is placed on a positioning system that maneuvers the part while it is being welded.
Target Customer
This product is aimed at OEMs to incorporate into their existing URCaps.
Components
The product is divided into two components:
Controller URScript API
EtherCAT URCap. (The EtherCAT URCap also contains an EtherCAT-specific URScript API.)
Controller URScript API
The controller provides a URScript API that enables customers to:
build the kinematics of a group of external axes (we loosely follow nomenclature from the PLCOpen standard)
jog external axes with desired target positions or velocities
perform frame tracking with a moving axis
synchronize the timing of the robot and external axes
perform coordinated motion with external axes by combining frame tracking and timing synchronization
calibrate axis relative to the robot
integrate with new World Model & Kinematic Tree features
On its own, the controller only generates and publishes target setpoints for the external axes. The setpoints are also published over RTDE an internal non-public (for now) message bus. The controller relies on other components to perform the lower level communication with hardware using the published target setpoints. For this product, we created an EtherCAT URCap that implements lower level EtherCAT communication of the controller’s target setpoints. The EtherCAT component utilizes the non-public message bus.
More details can be found in this document and the URScript manual here: MotionPlus URScript Manual
EtherCAT URCap
The URCap handles the lower-level communication with EtherCAT hardware. The URCap include three sub-components:
A Polyscope installation page GUI for setting up/starting EtherCAT communication.
A daemon that runs alongside the UR control and handles low-level EtherCAT communication.
A URScript API that enables programmers to manage EtherCAT communication with external axes in their own applications.
More details can be found in this document and the EtherCAT URCap manual here: MotionPlus EtherCAT URCap Manual
Background & Terminology
Coordinate Frame
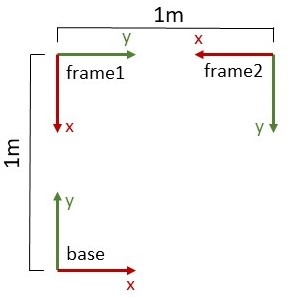
Coordinate frame is another word for Cartesian coordinate system. We often use the word frame as an abbreviation*.* A coordinate frame consists of a three-dimensional origin in space along with three mutually perpendicular coordinate axes. The coordinate axes are labelled as x, y, and z and are mutually perpendicular according to the “right-hand rule” In the example diagram on the right, there are three coordinate frames depicted with names “base”, “frame1” and “frame2”. The x and y axes are all shown and labelled but the z axes point out of the page and are not shown.
Pose
A pose is the unique numeric representation of a position and orientation in space defined in a specific coordinate frame. Coordinate frames have poses. In the diagram on the right, for example, the pose of coordinate frame *”*frame1” in the coordinates of coordinate frame “base” are (0m, 1m, 0m, 0rad, 0rad, -pi/2rad). (The orientation is expressed in rotation vector form, where the vector direction and magnitude specify the rotation direction and amount of rotation respectively. See here for more info.) This means that “frame1” can be measured to be 1m in the “base” y axis, and is rotated by -pi/2 radians around the “base” z axis.
More examples from the diagram at right:
the pose of “base” in the coordinates of “frame1” is (1m, 0m, 0m, 0rad, 0rad, pi/2rad)
the pose of “frame2” in the coordinates of “base” is (1m, 1m, 0m, 0rad, 0rad, pi rad)
the pose of “frame1” in the coordinates of “frame2” is (1m, 0m, 0m, 0rad, 0rad, -pi/2rad)
Reference Coordinate Frame
All poses are defined in a specific coordinate frame. We call this coordinate frame the reference coordinate frame or just reference frame for short. When no reference frame is explicitly mentioned, it’s implied that the reference frame is the robot’s base coordinate frame.
As an example, the poses of the frames in the diagram at right in the “base” reference frame are:
“frame1” pose is (0m, 1m, 0m, 0rad, 0rad, -pi/2rad)
“frame2” pose is (1m, 1m, 0m, 0rad, 0rad, pi rad)
“base” pose is (0m, 0m, 0m, 0rad, 0rad, 0rad)
Notice how the pose of frame “base” in the reference frame “base” is (0m, 0m, 0m, 0rad, 0rad, 0rad). This is always the case when expressing the pose of a frame expressed in the coordinates of itself
World Model & Kinematic Tree
A new set of features with Polyscope 5 that adds a URScript API for manipulating coordinate frames as objects. See: New Kinematic Tree Features in URScript
External Axis
A mechanical component that can produce linear or rotary motion. It has a motor controller that can accept position/velocity commands. An axis is “external” if it is not one of the robot’s native joints. In the controller’s world model, an external axis has properties that include:
unique string name identifier
parent axis or axis group
a pose relative to the parent
type (rotational or prismatic)
acceleration limits
velocity limits
position limits
a unique integer index
Axis Group
A set of related axes that are commanded together.
Note
We are loosely following the terminology used the PLCopen Motion Control Part 4 standard available for free download here: https://plcopen.org/downloads/plcopen-motion-control-part-4-version-10. In practice, an axis group will likely constitute a physical system. For example, a two-axis welding part positioner would typically be defined as a single axis group that contains two axes. However, an axis group can also be an abstract concept where multiple axes from separate physical systems could be incorporated into an axis group for the purpose of controlling them together. In the controller’s world model, an axis group has properties that include:
a unique string name identifier
child axes
a pose
Time Synchronization
The robot and axis group move simultaneously and complete their desired motions at the same time. For example, the TCP of a robot’s welding torch must reach its programmed waypoint at the same time as the programmed pose of a welding part positioner. Synchronizing the timing of the part positioner is accomplished by varying its axes velocities.
Frame Tracking
The robot adjusts its trajectory at each timestep based on the instantaneous joint positions of the axis group. For example, the TCP of the robot’s welding torch needs to follow a trajectory in the moving frame of a welding part positioner. This is accomplished with frame tracking.
Coordinated Motion
The combination of Time Synchronization and Frame Tracking defines coordinated motion. The TCP moving within the part frame, with the robot and external axis reaching the targeted position(s) simultaneously.
Axis Index
The axis index is a unique identifier that specifies where an axis’ data is placed in the target position and actual position vectors streamed over RTDE.
Overview of What’s New
As of Polyscope 5.16, programmers will be able to control external axes natively in URScript programs. The new feature set will enable programmers to easily write programs that do time synchronization, frame tracking, and coordinated motion with up to six external axes.
Setting Up External Axis Kinematics
The URScript API lets programmers create their external axis system by adding axes to the controller’s world model and organizing them into axis groups.
Note
The first release of the product supports a single rotary axis only. Six axes are available in the beta version of the product.
The API supports:
Configuring up to 6 axes in any form of tree kinematics that does not create a closed kinematic chain.
Giving axes unique string name identifiers that can be used throughout URScript programs
Configuring axes as rotary (e.g., a welding part positioner) or prismatic (e.g., a linear rail)
Setting axis position, velocity, and acceleration limits
Set the pose of the axes in their “zero-configuration” when their joint positions are 0. In practice, these poses would be calibrated from a physical system.
Configure the axes into named axis groups
Delete an axis group from the controller’s world model. This is useful if an axis needs to be placed into a different axis group so that it can move in concert with a different combination of axes. The supported process is to delete axis group and then construct a new one with the relevant axes.
Update the properties of an axis in the controller’s world model. This is useful if a calibration needs to be adjusted or the range of motion needs to be changed in the middle of a program.
Relevant commands from the URScript API include:
axis_group_addaxis_group_deleteaxis_group_add_axisaxis_group_update_axis
Relevant examples include:
Configuring an Axis For EtherCAT
EtherCAT functionality is enabled through the EtherCAT URCap. The URCap contains a daemon that handles the low-level communication with the EtherCAT axes. While a program is running, the controller and daemon communicate “behind the scenes” to pass the computed axis target positions and actual positions back and forth. The only responsibility of the customer developer is to call the appropriate URScript functions to start/stop ethercat communication, configure created axes as EtherCAT axes, and enable them when it is time for them to move.
Relevant commands from the URScript API include:
ethercat_startethercat_stopethercat_config_axisethercat_enable_axisethercat_disable_axis
Relevant examples include:
Jogging an External Axis
The URScript API provides two functions to implement jogging:
axis_group_movejdrives the axes that are part of a group to the desired joint positions. It generates trapezoidal velocity profiles where the joint accelerations and velocities are scaled so that the desired axis targets are reached simultaneously (the axis with the most constraining acceleration/velocity limits governs the scaling factors for the rest of the axes in the group).axis_group_speedj commands the axes to accelerate to target velocities. It generates trapezoidal velocity profiles and scales the accelerations so that the desired axis velocities of the group are all reached simultaneously.
Both functions can be safely called in URScript threads to implement simultaneous motion of the robot and any axis groups that are part of the world model. If a thread is killed (e.g. using the kill URScript command) while an axis_group_movej or axis_group_speedj is still in motion, the controller will stop any moving axes with their maximum allowable deceleration unless another URScript function immediately takes control over them (e.g., another call to axis_group_movej or *axis_group_speedj*).
Relevant commands from the URScript API include:
axis_group_movejaxis_group_speedj
Relevant examples include:
Frame Tracking with External Axes
Frame tracking is a mode that we implemented to command the robot to perform motion trajectories defined in a moving frame. It’s enabled and disabled in URScript using:
frame_tracking_enableframe_tracking_disable
The frame_tracking_enable call accepts the name of the frame to track, which can be the name of an axis, the name of a frame attached to an axis, or any frame in the world model. All robot motions performed after the call to frame_tracking_enable and before the call to frame_tracking_disable will be performed in the frame provided in the call to frame_tracking_enable. As an example
frame_tracking_enable("axis1")
movel(struct(pose=p[1,0,0,0,0,0], frame="axis1"), ...)
frame_tracking_disable()
would move the TCP to 1m in the x direction of the “axis1” frame and track the “axis1” frame if it moves.
Relevant examples include:
Motion Time Synchronization with External Axes
We have implemented variants of the UR robot motion commands (movep, movec, etc.) that execute robot motion and drive an axis group to target positions so that the axes’ reach their targets at the same time as the robot reaches its target. These commands are
movep_with_axis_groupmovec_with_axis_groupmovel_with_axis_groupmovej_with_axis_groupservoj_with_axis_group
Note
These commands only synchronize robot and axes motion in time. We have also implemented full coordinated motion as described here.
Relevant examples include:
Coordinated Motion with External Axes
Coordinated motion can be achieved with the simultaneous use of frame tracking and our time synchronized motion commands together*.* For example, this script:
frame_tracking_enable("axis1")
movep_with_axis_group(struct(pose=p[1,0,0,0,0,0], frame="axis1"), ..., group="mygroup", axis_targets=[3.1415])
frame_tracking_disable()
would move the TCP to a position 1m in the x direction of the “axis1” frame while rotating the axis (assuming “axis1” is the only axis added to the axis group “mygroup”) 180 degrees. The axis would arrive at its goal of 180 degrees at the same time as the TCP arriving at it’s goal and the TCP would simultaneously track with the “axis1” frame rotation motion.
Relevant examples include:
Streamed Axis Targets and Actuals
The target and actual axes positions are streamed via RTDE. Here is a description of the new RTDE fields:
name |
type |
comment |
|---|---|---|
target_external_q |
VECTOR6D |
this stores the target position commands that the controller generates for the external axes |
actual_external_q |
VECTOR6D |
this stores the actual positions of the external axes as reported by the encoders |
Up to six external axes are supported. The VECTOR6D structure contains a position for each axis. If axes are not used, the VECTOR6D contains zero for that index.
Integration with World Model & Kinematic Tree
We are working to fully integrate the part positioner and kinematic tree produs together so they work seamlessly together. This work is not fully complete.
Attaching Axes and Groups to the Kinematic Tree: There are some important limitations of the current integration that are important to know. The first is that world model frames (created using the add_frame command) can be attached to axes and groups, but not vice versa. Here is a table showing what can be attached to one another.
World Model & Axis Group Attachment Policy |
|||
|---|---|---|---|
frame |
group |
axis |
|
can attach frame to |
yes, with attach_frame |
yes, with attach_frame |
yes, with attach_frame |
can attach group to |
no, except groups are attached to “world” during construction |
no |
no |
can attach axis to |
no |
yes, by construction with axis_group_add_axis |
yes, by construction with axis_group_add_axis |
Using Axes and Groups in World Model Functions: Many world model functions have been expanded to take names of axes and groups as arguments. Here is a list of world model functions that can take either an axis or group name in arguments:
get_pose: any of the arguments can be an axis or group nameconvert_pose: any of the arguments can be an axis or group nameadd_frame: the ref_frame argument can be an axis or group nameattach_frame: the parent argument can be an axis or group namemove_frame: the ref_frame argument can be an axis or group namemovec:if providing structs as arguments for pose_via or pose_to, the “frame” struct member can be an axis or group name. If providing string names for pose_via or pose_to, the string names can also be axes or group names.movej: if providing a struct for the goal argument, the “frame” struct member can be an axis or group name. If providing a string name for goal, the string name can be an axis or group name.movel: if providing a struct for the goal argument, the “frame” struct member can be an axis or group name. If providing a string name for goal, the string name can be an axis or group name.movep: if providing a struct for the goal argument, the “frame” struct member can be an axis or group name. If providing a string name for goal, the string name can be an axis or group name.speedl: if providing a struct for the xd argument, the “frame” struct member can be an axis or group name.
Relevant examples include:
Known Limitations
Blends with Frame Tracking
When frame tracking has been turned on to track an external axis (see frame_tracking_enable), the following blends are not yet implemented:
movejormovej_with_axis_grouptomovelormovel_with_axis_groupmovelormovel_with_axis_grouptomovejormovej_with_axis_groupmovejormovej_with_axis_grouptomovepormovep_with_axis_groupmovejormovej_with_axis_grouptomovecormovec_with_axis_group