You're reading the documentation for an obsolete version. For the latest released version, please have a look at mp1.5.
Installation
MotionPlus Packages
There are two packages for MotionPlus, each with a different options available. A license file is required to run either of these packages on the UR Control box. License downloads are available through myUR.
MotionPlus Basic
This covers a single axis control over EtherCAT* without coordinated motion. It is intended for indexed positioning of an external motorized axis. It does not support multiple external axes nor does it support coordinated or synchronized motion between the robot TCP (six joints) and one or more external axes.
Motion Plus Advanced
This covers six axes, either rotary or linear across one or more axis groups over EtherCAT. It supports independent as well as “stacked” axes, and coordinated and synchronized motion with a frame attached to an axis. This is the full version of MotionPlus.
*EtherCAT is a registered trademark and patented technology, licensed by Beckhoff Automation
Terminology
EtherCAT Master
An EtherCAT network is driven by an EtherCAT Master device. The master is the only device in an EtherCAT segment that is allowed to send messages - the slaves can add data and send the frame along, but they cannot create new messages on their own.
EtherCAT Slave
An external axis (an EtherCAT servo drive) is a slave device on an EtherCAT network. It reads commands and target joint positions from the EtherCAT frame sent by the EtherCAT master and sends the actual joint positions and status information back via the EtherCAT frame.
Remove MotionPlus URCap
If you are upgrading/downgrading, we recommend that you remove the existing version of MotionPlus URCap first:
Navigate to the URCap Management page.
Select the target URCap, then click the Remove button.
Click the Restart button to restart Polyscope.
Install MotionPlus URCap
Follow the standard process of installing a URCap:
Download and copy the URCap package to a USB drive, and connect the USB drive to the teach pendant.
Navigate to the URCap Management page.
Click the Add / Install button, select the target URCap from the USB drive, then click the Open button.
Click the Restart button to restart Polyscope.
Start MotionPlus Service
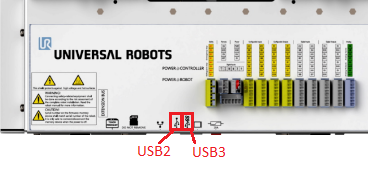
Connect the USB-Ethernet adapter to one of the USB ports on the UR Controller. The SS USB port (USB3 port) is recommended.
Navigate to the MotionPlus installation tab.
Select the network interface corresponding to the connected Ethernet adapter (generally, “eth1”).
You may see only “sim” if the connected no adapter has been added or the added Ethernet adapter isn’t compatible.
Click the Refresh button, if the adapter doesn’t show up. Restart Polyscope, if the refresh doesn’t work.
Click the Start button to start the MotionPlus Service.
When the service has started, the Service State will display as RUNNING
In case the status does not change to RUNNING within 10 seconds, the service may have crashed, and the reason may be recorded in the MotionPlus Service log file.
Export MotionPlus Service Log
The log of the MotionPlus Service can be transferred to a USB drive and viewed as a text file on any computer:
Navigate to the MotionPlus installation tab.
Click the Export Log button and specify the file name.
Select Save to USB, you can then view the log file on another computer.
Installation Tab User Interface
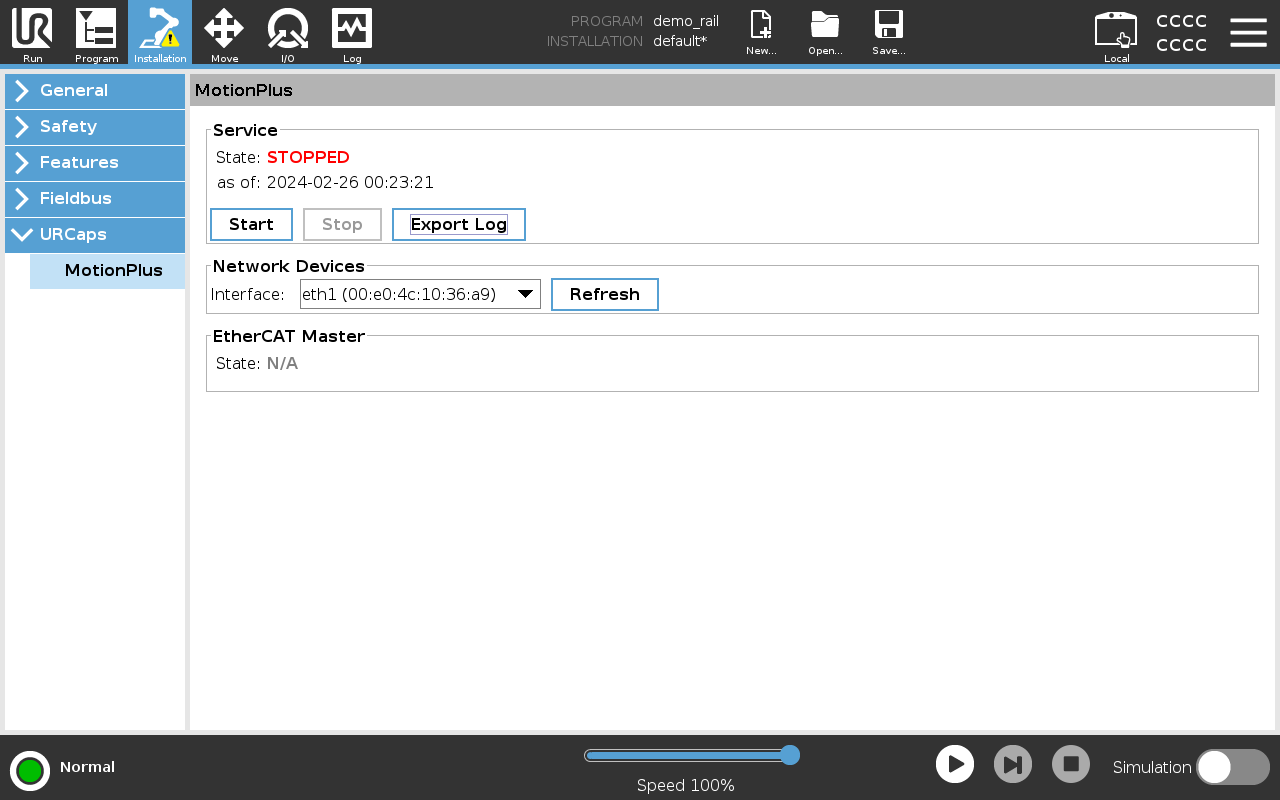
The Installation Tab User Interface provides the following functions:
Service
show status of the MotionPlus Service
start/stop the MotionPlus Service
export log of the MotionPlus Service to a file
Network Devices
select network interface for EtherCAT communication
NOTE: the Simulated network interface implements a virtual EtherCAT network in which EtherCAT communication is entirely simulated.
EtherCAT Master
shows the EtherCAT Master status/error