Release Notes
MotionPlus 1.5.0
The 1.5.0 release requires Polyscope 5.24.0 and the urcap file MotionPlus-1.5.0.urcap.
Major Changes
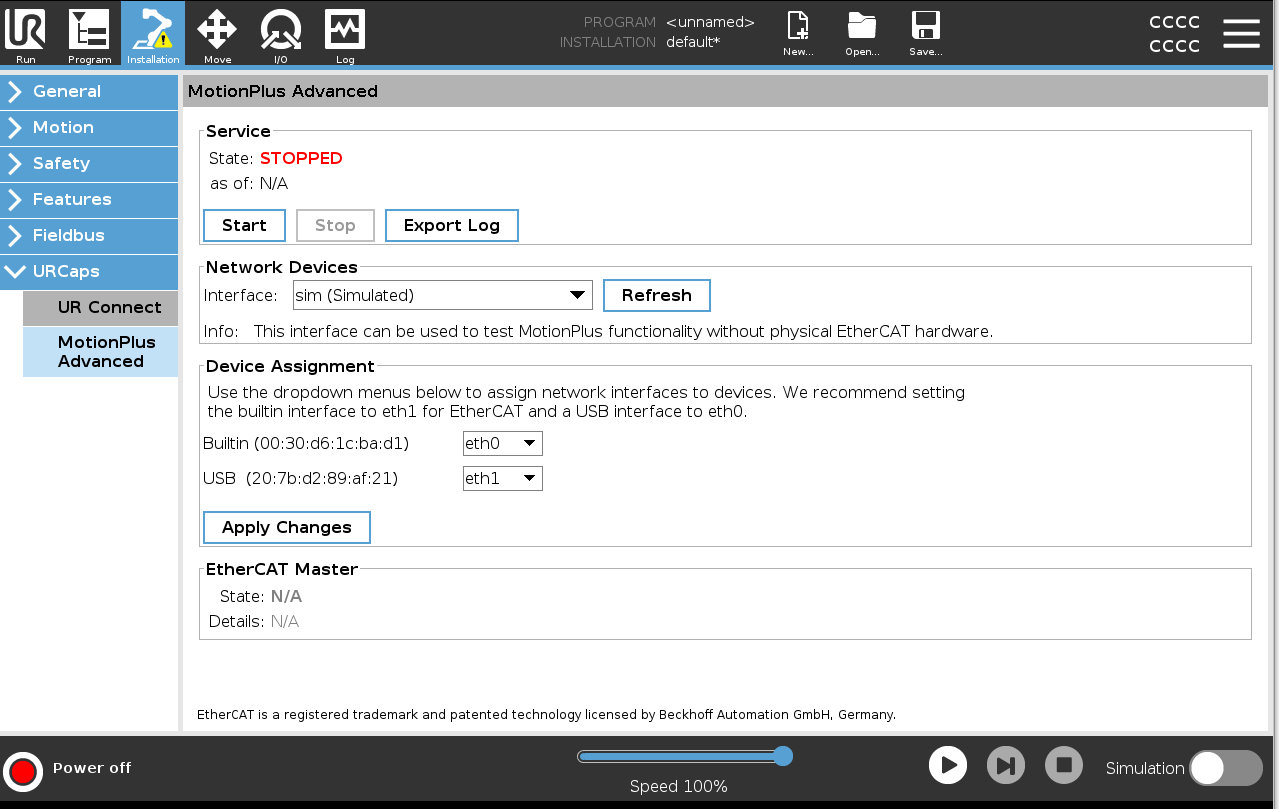
The URCap installation page now has a UI for selecting the Linux ethernet devices associated with the network hardware plugged into the robot controller. This is to replace the port swap script that was distributed with prior releases. MotionPlus supports setups where the builtin ethernet interface is used exclusively for EtherCAT communication.
The URScript functions
ethercat_read_axis_sdo()andethercat_write_axis_sdo()now support the reading/writing of byte array values (using “BA” as thetypeparameter).The XML-RPC interface call WriteSdo now accommodates a type of byte array (“BA”) and a value string representation of a byte array to be passed.
There is a breaking change in the XML-RPC interface call ReadSdo. The is_str struct element in the return value has been replaced with the value_type field to accommodate the new byte array return type.
Minor Changes
Reduced the possibility of EtherCAT DC timeout errors when navigating to the Polyscope “Move To” dialogue. This particularly applies to large systems (e.g., more than 4 axes).
Bugs Fixed
The URScript function
ethercat_config_axis()would raise a spurious overflow warning popup if any of its parametersfeed_constant,counts_per_rev, andgear_ratio_floatwere negative.Polyscope could indicate No Controller if repeatedly running a program that called
reset_world_model()when switching between the teach pendant Simulation Mode and Real Robot modes.