You're reading the documentation for an obsolete version. For the latest released version, please have a look at mp1.5.
MotionPlus URCap
URCap Design
The following diagram shows the architecture design of the MotionPlus URCap:
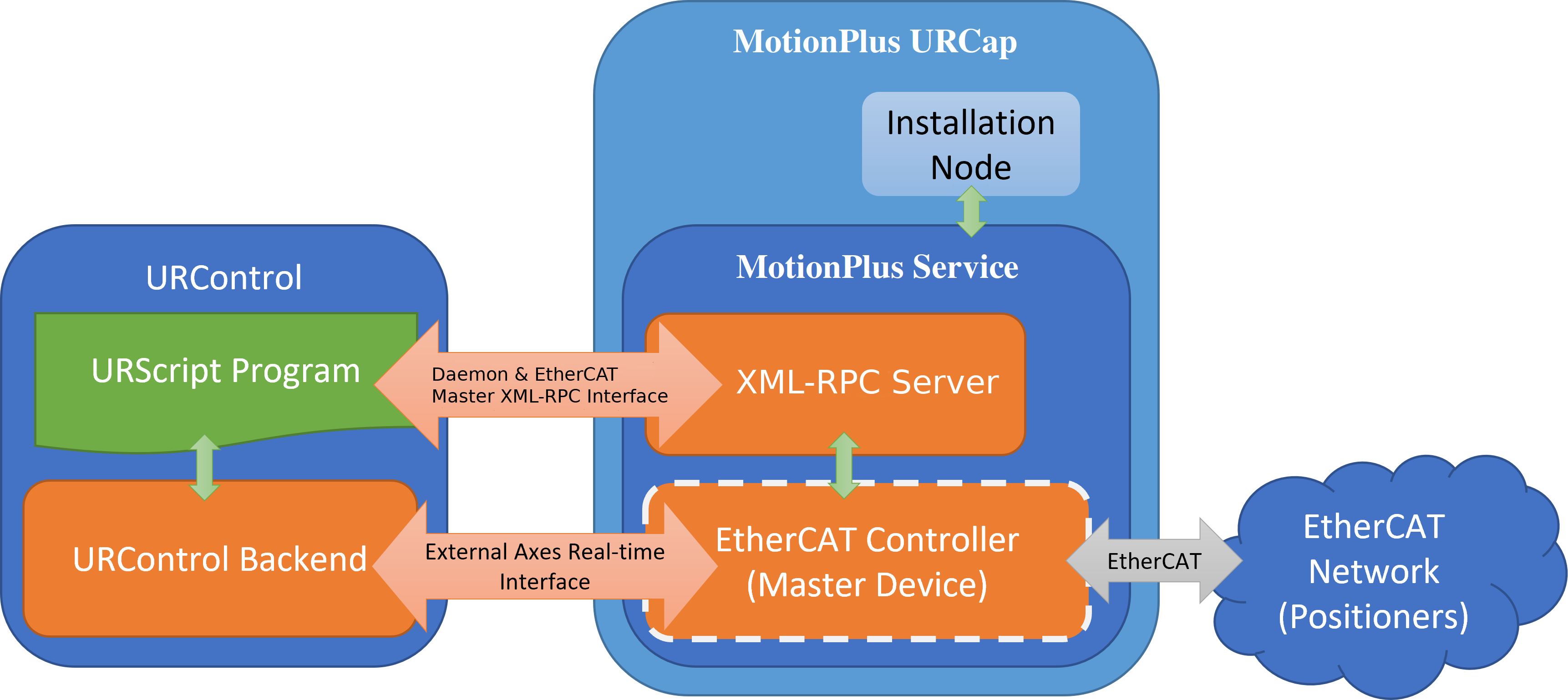
The MotionPlus URCap consists of:
MotionPlus Service Process - Hosts an EtherCAT Master Device Implementation and an XML-RPC server to help interface with the EtherCAT Master Device Implementation from the URScript program. Functionality provided through the XML-RPC interface is described here. The URCap provides an URScript API that interacts with the XML-RPC interface.
Installation Tab - Provides a GUI for configuring, starting, and stopping the MotionPlus Service Process. See here.
EtherCAT URScript API - Provides a URScript interface for lower-level EtherCAT functionality that is loaded into the Polyscope program preamble by the Installation Tab. The API abstracts much of the XML-RPC communication with the MotionPlus Service Process.
Terminology
EtherCAT Master
An EtherCAT* network is driven by an EtherCAT Master device. The master is the only device in an EtherCAT segment that is allowed to send messages - the slaves can add data and send the frame along, but they cannot create new messages on their own.
*EtherCAT is a registered trademark and patented technology, licensed by Beckhoff Automation
EtherCAT Slave
An external axis (an EtherCAT servo drive) is a slave device on an EtherCAT network. It reads commands and target joint positions from the EtherCAT frame sent by the EtherCAT master and sends the actual joint positions and status information back via the EtherCAT frame.
Installation
Remove MotionPlus URCap
If you are upgrading/downgrading, we recommend that you remove the existing version of MotionPlus URCap first:
Navigate to the URCap Management page.
Select the target URCap, then click the Remove button.
Click the Restart button to restart Polyscope.
Install MotionPlus URCap
Follow the standard process of installing a URCap:
Download and copy the URCap package to a USB drive, and connect the USB drive to the teach pendant.
Navigate to the URCap Management page.
Click the Add / Install button, select the target URCap from the USB drive, then click the Open button.
Click the Restart button to restart Polyscope.
Start MotionPlus Service
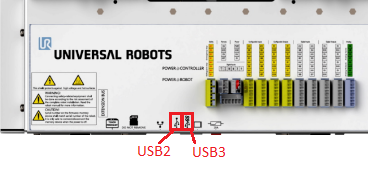
Connect the USB-Ethernet adapter to one of the USB ports on the UR Controller. The SS USB port (USB3 port) is recommended.
Navigate to the MotionPlus installation tab.
Select the network interface corresponding to the connected Ethernet adapter (generally, “eth1”).
You may see only “sim” if the connected no adapter has been added or the added Ethernet adapter isn’t compatible.
Click the Refresh button, if the adapter doesn’t show up. Restart Polyscope, if the refresh doesn’t work.
Click the Start button to start the MotionPlus Service.
When the service has started, the Service State will display as RUNNING
In case the status does not change to RUNNING within 10 seconds, the service may have crashed, and the reason may be recorded in the MotionPlus Service log file.
Export MotionPlus Service Log
The log of the MotionPlus Service can be transferred to a USB drive and viewed as a text file on any computer:
Navigate to the MotionPlus installation tab.
Click the Export Log button and specify the file name.
Select Save to USB, you can then view the log file on another computer.
Installation Tab User Interface
The Installation Tab User Interface provides the following functions:
Service
show status of the MotionPlus Service
start/stop the MotionPlus Service
export log of the MotionPlus Service to a file
Network Devices
select network interface for EtherCAT communication
NOTE: the Simulated network interface implements a virtual EtherCAT network in which EtherCAT communication is entirely simulated.
EtherCAT Master
shows the EtherCAT Master status/error
XML-RPC Methods
The XML-RPC server hosted by the MotionPlus Service provides the set of methods as described below. In general, most applications will communicate with the MotionPlus service through the UR Script API. But it is possible for PS5 applications (written in Java) to communicate directly with the MotionPlus service via XML. This section documents the XML-RPC interface.
GetStatus
Purpose: get EtherCAT Master status
Precondition: none
Parameter: none
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
timestamp |
struct |
System timestamp (in local time zone) when method was called. sec (int) - whole seconds elapsed since the UNIX epoch (1970-01-01, 00:00:00). nsec (int) - nanoseconds elapsed in addition to sec. |
master_running |
bool |
Flag indicating whether EtherCAT Master is running. |
master_error |
struct |
Current runtime error for the EtherCAT Master (may be cleared using ClearError method). error_code (int) - numeric code for the runtime error; zero, if there is no active error. error_message (string) - message describing the runtime error. |
Typical Usage
ethercat_begin_status_monitor(): calls this method periodically to check whether timestamp is updating and any runtime error is present
ethercat_is_master_running(): calls this method and returns value of the master_running field
ethercat_stop(): calls this method continually to determine when the EtherCAT Master has stopped
URCap Installation Tab: calls this method periodically to update Service Status display
GetMasterState
Purpose: get EtherCAT Master state
Precondition: none
Parameter: none
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
timestamp |
struct |
System timestamp (in local time zone) when method was called. sec (int) - whole seconds elapsed since the UNIX epoch (1970-01-01, 00:00:00). nsec (int) - nanoseconds elapsed in addition to sec. |
state |
string |
Current state of EtherCAT Master; should be one of the following values:STANDBYINITPRE_OPSAFE_OPOP |
Typical Usage
ethercat_start(): calls this method continually to determine when EtherCAT Master has reached OP
GetAxisPositions
Purpose: get current target and actual positions of the axes controlled by the EtherCAT Master
Precondition: EtherCAT Master must be running for the result to be valid
Parameter: none
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
timestamp |
struct |
System timestamp (in local time zone) when method was called. sec (int) - whole seconds elapsed since the UNIX epoch (1970-01-01, 00:00:00). nsec (int) - nanoseconds elapsed in addition to sec. |
axis_count |
int |
Number of configured axes. |
axis_indices |
int[] |
Indices* for the configured axes. |
target_positions |
double[] |
Target positions* for the configured axes (in radians). |
actual_positions |
double[] |
Actual positions* for the configured axes (in radians). |
target_position_counts |
int[] |
Target positions* for the configured axes (in encoder counts). |
actual_position_counts |
int[] |
Actual positions* for the configured axes (in encoder counts). |
*Only the first axis_count number of items in the array are valid. |
Typical Usage
ethercat_get_axis_positions(): calls this method and returns the result
GetAxisErrors
Purpose: get current error codes for the axes controlled by the EtherCAT Master
Precondition: EtherCAT Master must be running for the result to be valid
Parameter: none
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
timestamp |
struct |
System timestamp (in local time zone) when method was called. sec (int) - whole seconds elapsed since the UNIX epoch (1970-01-01, 00:00:00). nsec (int) - nanoseconds elapsed in addition to sec. |
axis_count |
int |
Number of configured axes. |
axis_indices |
int[] |
Indices* for the configured axes. |
axis_errors |
int[] |
Error codes* for the configured axes. A zero error code indicates there is no fault with the drive. A non-zero error code indicates a particular fault, as described by the drive’s manual. |
*Only the first axis_count number of items in the array are valid. |
Typical Usage
ethercat_get_axis_errors(): calls this method and returns the result
SelectDevice
Purpose: set/change Ethernet interface used by the EtherCAT Master
Precondition: EtherCAT Master must be stopped
Parameter:
Name |
Type |
Description |
|---|---|---|
device_name |
string |
Name of Ethernet interface. “SIMULATION” for virtual EtherCAT network, where EtherCAT communication is entirely simulated. Otherwise, it must match the name of network interface on the UR Controller (e.g. “eth1”). |
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
error_code |
int |
Numeric code for the error; zero, if there is no error. |
error_message |
string |
Message describing the error. |
Typical Usage
URCap Installation Tab: calls this method with selected network interface when Start button is clicked
ClearError
Purpose: clear any EtherCAT Master runtime error (as reported by GetStatus method result)
Precondition: none
Parameter: none
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
error_code |
int |
Numeric code for the error; zero, if there is no error. |
error_message |
string |
Message describing the error. |
Typical Usage
ethercat_clear_error(): calls this method and halts program if result contains non-zero error code URCap Installation Tab: calls this method before each program
SetMasterParameter
Purpose: set parameter for the EtherCAT Master
Precondition: EtherCAT Master must be stopped
Parameter:
Name |
Type |
Description |
|---|---|---|
key |
string |
Name of parameter to set. |
value |
string |
New value for the selected parameter. |
Detail
The following EtherCAT Master parameters are currently supported:
Key |
Supported Values |
Default Value |
Description |
|---|---|---|---|
dc_enable |
“true”, “false” |
“false” |
Whether EtherCAT Distributed Clock should be enabled. |
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
error_code |
int |
Numeric code for the error; zero, if there is no error. |
error_message |
string |
Message describing the error. |
Typical Usage
ethercat_set_parameter(): calls this method and halts program if result contains non-zero error code
ConfigureAxis
Purpose: configure EtherCAT slave device for given external axis
Precondition:
EtherCAT Master must be stopped
The slave device must not have a preexisting configuration for another axis
There must not be a preexisting slave device configuration for the given axis
Important: As of Polyscope 5.16, only a single axis can be configured
Parameter:
Name |
Type |
Description |
|---|---|---|
name |
string |
Name of external axis. |
axis_index |
int |
Index of external axis (as reported by |
station_address |
int |
Station address for EtherCAT slave device; must be 1 .. 65535. |
counts_per_rev |
int |
Encoder counts* per revolution of external axis drive shaft; must be positive. |
gear_ratio |
double |
Gear ratio* of external axis joint. |
feed_constant |
double |
Feed constant* (in radians) for external axis joint (this is usually |
zero_offset_count |
int |
Zero offset* (in encoder counts) for external axis joint. |
*Drive joint angles will be computed with the following formula: |
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
error_code |
int |
Numeric code for the error; zero, if there is no error. |
error_message |
string |
Message describing the error. |
Typical Usage
ethercat_config_axis(): calls this method with given arguments and halts program if result contains non-zero error code
ResetConfiguration
Purpose: delete all configurations for EtherCAT slave drives
Precondition(s): EtherCAT Master must be stopped
Parameter(s): none
Result
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
error_code |
int |
Numeric code for the error; zero, if there is no error. |
error_message |
string |
Message describing the error. |
Typical Usage
ethercat_stop(): calls this method when reset parameter is “true” and halts program if result contains non-zero error code
StartMaster
Purpose: start EtherCAT Master
Precondition
The EtherCAT Master must be stopped.
The Ethernet interface to be used by the EtherCAT aster must have been provided via the SelectDevice method.
An EtherCAT slave device must have been configured using the ConfigureAxis method.
Any configured slave device must be connected to the same network the EtherCAT Master will be using.
Any EtherCAT Master runtime error that occurred must have been cleared using the ClearError method.
Parameter: none
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
error_code |
int |
Numeric code for the error; zero, if there is no error. |
error_message |
string |
Message describing the error. |
Typical Usage
ethercat_start(): calls this method and halts program if result contains non-zero error code
StopMaster
Purpose: Command EtherCAT Master to stop if it is running
NOTE: This method does not wait for the EtherCAT Master to stop before returning its result. If an XML-RPC client wants to know when the EtherCAT Master actually stops, it needs to monitor the master_running field in the GetStatus method result.
Precondition: none
Parameter: none
Return
Structure with the following members:
Name |
Type |
Description |
|---|---|---|
error_code |
int |
Numeric code for the error; zero, if there is no error. |
error_message |
string |
Message describing the error. |
Typical Usage
ethercat_stop(): calls this method and halts program if result contains non-zero error code