Primary and Secondary Interfaces
The UR controller provides servers that send robot state data and receive URScript commands. The primary interface transmits robot state data and additional messages. The secondary interface transmits robot state data only. The data is mainly used for communication between the GUI and the controller. Both accept URScript commands with state data updates at a 10 Hz rate. This makes it possible to control the robot remotely with a dynamically generated robot program.
TCP ports used by interfaces
Primary client: port 30001 (Robot state and messages)
Secondary client: port 30002 (Only robot state and the Version messages)
Primary client read only: port 30011 (Robot state and messages)
Secondary client read only: port 30012 (Only robot state and the Version messages)
Messages
Data sizes
Data Type |
Size |
|---|---|
int16_t |
2 bytes |
int32_t |
4 bytes |
float |
4 bytes |
double |
8 bytes |
bool |
1 byte |
uint8_t |
1 byte |
Array notation is used where the same type is repeated several times.
Example of fixed-length array: double DHa[6] — 6 doubles, 48 bytes total.
Example of variable-length array: char buildData[] — either the length is given as one of the fields, or the data spans until the end of the package.
Commands sent to Primary and Secondary interfaces
The primary interface accepts script commands. Typically, commands are aggregated into a complete program.
If remote control is intended to dynamically control part of the trajectory, it is recommended to use Interpreter Mode instead. Refer to the Script Manual for more information.
NOTE: Commands not documented in the Script Manual are used internally by UR software and are not backwards compatible.
Status messages sent to clients
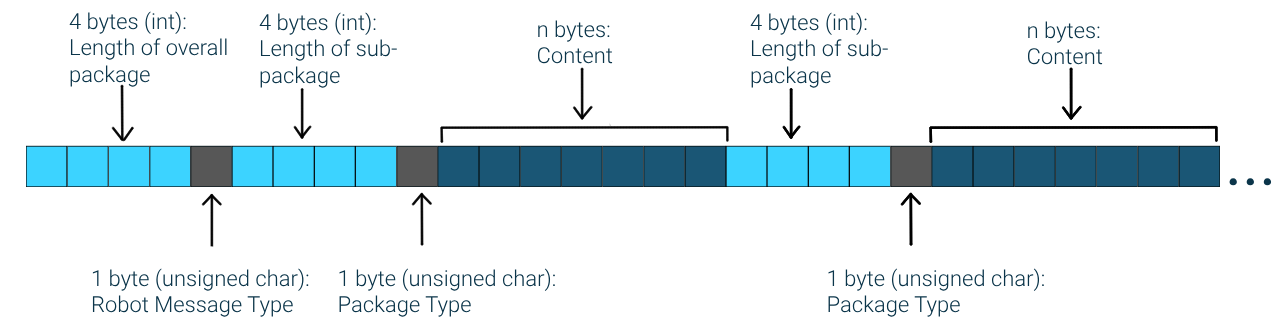
All messages and sub-packages contain a length field at the beginning, followed by a type field.
NOTE: Future Polyscope versions may add additional fields to existing messages or sub-message types. Client code should be able to interpret partial messages and ignore the remaining data. Deprecated and reserved fields should not be used, as they can change content in future software releases.
Robot State Message
This message is sent periodically and contains multiple sub-packages.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
Sub packages |
One or more sub packages. Each contains size, type, and package specific data |
Robot Mode Data (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
bool isRealRobotConnected |
||
bool isRealRobotEnabled |
||
bool isRobotPowerOn |
||
bool isEmergencyStopped |
||
bool isProtectiveStopped |
||
bool isProgramRunning |
||
bool isProgramPaused |
||
uint8_t robotMode |
||
uint8_t controlMode |
||
double targetSpeedFraction |
||
double speedScaling |
||
double targetSpeedFractionLimit |
||
uint8_t reserved |
Internal use only |
Joint Data (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
Following 8 fields are repeated for each joint (6 times) |
||
→ double q_actual |
||
→ double q_target |
||
→ double qd_actual |
||
→ float I_actual |
||
→ float V_actual |
||
→ float T_motor |
||
→ float reserved |
Deprecated — ignore |
|
→ uint8_t jointMode |
Tool Data (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
uint8_t analogInputRange0 |
||
uint8_t analogInputRange1 |
||
double analogInput0 |
||
double analogInput1 |
||
float toolVoltage48V |
||
uint8_t toolOutputVoltage |
||
float toolCurrent |
||
float toolTemperature |
||
uint8_t toolMode |
Masterboard Data (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
uint32_t digitalInputBits |
||
uint32_t digitalOutputBits |
||
uint8_t analogInputRange0 |
||
uint8_t analogInputRange1 |
||
double analogInput0 |
||
double analogInput1 |
||
char analogOutputDomain0 |
||
char analogOutputDomain1 |
||
double analogOutput0 |
||
double analogOutput1 |
||
float masterBoardTemperature |
||
float robotVoltage48V |
||
float robotCurrent |
||
float masterIOCurrent |
||
uint8_t safetyMode |
Subset of Safety Modes |
|
bool inReducedMode |
||
bool immiInterfaceInstalled |
True if the IMMI interface is installed |
|
Following 4 fields are present only if immiInterfaceInstalled is true |
||
→ uint32_t immiInputBits |
||
→ uint32_t immiOutputBits |
||
→ float immiVoltage24V |
||
→ float immiCurrent |
||
uint32_t reserved |
Used by Universal Robots software only |
|
uint8_t operationalModeSelectorInput |
||
bool threePositionEnablingDeviceInput |
||
uint8_t safetyStatus |
Cartesian Info (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
double X |
||
double Y |
||
double Z |
||
double Rx |
||
double Ry |
||
double Rz |
||
double TCPOffsetX |
||
double TCPOffsetY |
||
double TCPOffsetZ |
||
double TCPOffsetRx |
||
double TCPOffsetRy |
||
double TCPOffsetRz |
Kinematics Info (Sub Package of Robot State Message)
This information is sent upon leaving initialization mode and when the kinematics configuration has changed.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
uint32_t checksum[6] |
||
double DHtheta[6] |
||
double DHa[6] |
||
double DHd[6] |
||
double DHalpha[6] |
||
uint32_t calibrationStatus |
Configuration Data (Sub Package of Robot State Message)
This information is sent once after the client connection is established.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
Following 2 fields are repeated for each joint (6 times) |
||
→ double jointMinLimit |
||
→ double jointMaxLimit |
||
Following 2 fields are repeated for each joint (6 times) |
||
→ double jointMaxSpeed |
||
→ double jointMaxAcceleration |
||
double vJointDefault |
||
double aJointDefault |
||
double vToolDefault |
||
double aToolDefault |
||
double eqRadius |
||
double DHa[6] |
||
double Dhd[6] |
||
double DHalpha[6] |
||
double DHtheta[6] |
||
int32_t masterboardVersion |
||
int32_t reserved |
Deprecated |
|
int32_t robotType |
||
int32_t robotSubType |
||
int16_t reserved |
Used by Universal Robots software only |
5.26.0 / 10.13.0 |
int16_t reserved |
Used by Universal Robots software only |
5.26.0 / 10.13.0 |
Force Mode Data (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
double Fx |
Deprecated — always contains the value 0.0 |
|
double Fy |
Deprecated — always contains the value 0.0 |
|
double Fz |
Deprecated — always contains the value 0.0 |
|
double Frx |
Deprecated — always contains the value 0.0 |
|
double Fry |
Deprecated — always contains the value 0.0 |
|
double Frz |
Deprecated — always contains the value 0.0 |
|
double robotDexterity |
Additional Info (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
uint8_t tpButtonState |
||
bool isManualFreedriveAllowed |
||
bool isFreedriveIOPressed |
||
uint8_t tpType |
Calibration Data (Sub Package of Robot State Message, Internally Used Only)
This sub-package is used internally by UR software and should be ignored.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
uint8_t packageType |
|
|
uint32_t reserved |
Used by Universal Robots software only |
Safety Data (Sub Package of Robot State Message)
This sub-package is used internally by UR software and should be ignored.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
unsigned char packageType |
|
|
reserved |
Used by Universal Robots software only |
Tool Communication Info (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
unsigned char packageType |
|
|
bool toolCommunicationIsEnabled |
||
int32_t baudRate |
||
int32_t parity |
||
int32_t stopBits |
||
float RxIdleChars |
||
float TxIdleChars |
Tool Mode Info (Sub Package of Robot State Message)
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
unsigned char packageType |
|
|
uint8_t outputMode |
||
uint8_t digitalOutputModePin0 |
||
uint8_t digitalOutputModePin1 |
Singularity Info (Sub Package of Robot State Message)
This sub-package is used internally by UR software and should be ignored. Package is sent only when robot is in freedrive mode with individual lockable axes.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
unsigned char packageType |
|
|
uint8_t singularitySeverity |
||
uint8_t singularityType |
Payload Info (Sub Package of Robot State Message)
This sub-package is used internally by UR software and should be ignored.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
unsigned char packageType |
|
|
reserved |
Used by Universal Robots software only |
Internal Data (Sub Package of Robot State Message)
This sub-package is used internally by UR software and should be ignored.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
|
unsigned char packageType |
|
|
reserved |
Used by Universal Robots software only |
Cumulative Runtime Data (Sub Package of Robot State Message)
Message is sent once per second.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t packageSize |
Total length of subpackage including this field |
5.23.0 / 10.11.0 |
unsigned char packageType |
|
5.23.0 / 10.11.0 |
double robot_energy_consumed_Wh |
Robot Arm energy consumption since controller startup [Wh]. |
5.23.0 / 10.11.0 |
double robot_braking_energy_dissipated_Wh |
Robot Arm braking energy dissipated since controller startup [Wh]. |
5.23.0 / 10.11.0 |
Robot Message
There are several messages grouped under the “Robot Message” type. Note that sub-messages don’t contain their own size field; only the main message does. Each complete message contains exactly one sub-message.
Some messages are sent only to Primary Interface clients.
Version Message
This is the first package sent on both the primary and secondary client interfaces. Package is sent only once.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
char robotMessageType |
|
|
char projectNameSize |
||
char projectName[] |
||
uint8_t majorVersion |
||
uint8_t minorVersion |
||
int32_t bugfixVersion |
||
int32_t buildNumber |
||
char buildDate[] |
Safety Mode Message
The message is sent only to Primary Interface clients.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
uint8_t robotMessageType |
|
|
int32_t robotMessageCode |
||
int32_t robotMessageArgument |
||
uint8_t safetyModeType |
||
uint32_t reportDataType |
Following data type depends on this value |
|
0,1:uint32_t |
||
→ type32 reportData |
Robot Comm Message
The message is sent only to Primary Interface clients.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
uint8_t robotMessageType |
|
|
uint32_t robotMessageCode |
||
uint32_t robotMessageArgument |
||
int32_t robotMessageReportLevel |
||
uint32_t dataType |
Following data type depends on this value |
|
0,1:uint32_t |
||
→ type32 reportData |
||
5:String |
||
→ uint16_t textLength |
||
→ char textMessage[] |
Last field is 32-bit number for dataType (0-4) or variable length string for dataType 5.
Key Message
The message is sent only to Primary Interface clients.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
uint8_t robotMessageType |
|
|
uint32_t robotMessageCode |
||
uint32_t robotMessageArgument |
||
uint8_t robotMessageTitleLength |
Length of the following robotMessageTitle not including this byte |
|
char robotMessageTitle[] |
||
char keyTextMessage[] |
Program Threads Message
The message is sent only to Primary Interface clients.
Information about all running threads might be spread into multiple messages if threads have long names. Only threads that contain labeled lines are reported. Refer to script program generated by Polyscope UI for label examples.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
uint8_t robotMessageType |
|
|
Following structure repeats for each running program thread |
||
→ int32_t labelId |
Last executed line label id |
|
→ uint8_t labelNameLength |
||
→ char labelName[] |
||
→ uint16_t threadNameLength |
||
→ char threadName[] |
Request Value Message
The message is sent only to Primary Interface clients.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
uint8_t robotMessageType |
|
|
uint32_t requestId |
||
uint32_t requestedType |
||
char requestTextMessage[] |
Text Message
The message is sent only to Primary Interface clients.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
uint8_t robotMessageType |
|
|
char textMessage[] |
Runtime Exception Message
The message is sent only to Primary Interface clients.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
int8_t source |
||
uint8_t robotMessageType |
|
|
uint32_t scriptLineNumber |
||
uint32_t scriptColumnNumber |
||
char runtimeExceptionTextMessage[] |
Global Variable Messages
Global Variables Setup Message
The message is sent only to Primary Interface clients.
List of global variables is sent once when program starts. Afterwards update messages are sent every 100ms. If there are more variable names than can fit into one message, multiple messages will be sent with incrementing startIndex.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
uint8_t robotMessageType |
|
|
uint16_t startIndex |
||
char variableNames[] |
List of names separated by new line character (‘\n’ character). |
Example with 2 global variables: “var_1\nvar_2\n”
Global Variables Update Message
The message is sent only to Primary Interface clients.
If values can not fit into one message, multiple messages will be sent with incrementing startIndex. Order of values is matching order of variable names sent in Global Variables Setup Message.
Field |
Description |
Introduced in version |
|---|---|---|
uint32_t messageSize |
Length of overall package: total length of package including this field |
|
uint8_t messageType |
|
|
uint64_t timestamp |
Microseconds since controller started |
|
uint8_t robotMessageType |
|
|
uint16_t startIndex |
||
uint8_t variableValues[] |
Each variable value contains type byte, data, and terminating new line character (‘\n’ character).
Example - two variables of type BOOL=True , and STRING=”aaaa”: 0d 01 0a 03 00 04 61 61 61 61 0a
0d |
01 |
0a |
03 |
00 |
04 |
61 |
61 |
61 |
61 |
0a |
|---|---|---|---|---|---|---|---|---|---|---|
BOOL |
1=True |
Separator |
STRING |
Length LSB |
Length MSB |
‘a’ |
‘a’ |
‘a’ |
‘a’ |
Separator |
Data types:
Name |
Value |
Description |
|---|---|---|
NONE |
0 |
No content |
CONST_STRING |
3 |
uint16_t length |
VAR_STRING |
4 |
uint16_t length |
POSE |
12 |
float x |
BOOL |
13 |
uint8_t value |
NUM |
14 |
float value |
INT |
15 |
int32_t value |
FLOAT |
16 |
float value |
LIST |
17 |
uint16_t listLength |
MATRIX |
18 |
uint16_t nRows |
Constants
Constants used in the protocol messages.
NOTE: Unlisted values are reserved for internal use.
Control Modes
Name |
Value |
Description |
|---|---|---|
POSITION |
0 |
|
TEACH |
1 |
|
FORCE |
2 |
|
TORQUE |
3 |
Robot Modes
Name |
Value |
Description |
|---|---|---|
DISCONNECTED |
0 |
Connection with the safety control board is not established. |
CONFIRM_SAFETY |
1 |
Robot is validating and updating the safety settings. |
BOOTING |
2 |
Safety control board is booting up and its communication with the other components is being verified. |
POWER_OFF |
3 |
Robot is ready to boot up the joints. |
POWER_ON |
4 |
Robot’s joints are booting up. |
IDLE |
5 |
Robot’s joints are ready (to go to RUNNING or BACKDRIVE modes). |
BACKDRIVE |
6 |
Robot is in back-drive mode. It is possible to move the robot in a restricted way. Brakes are being released when needed. |
RUNNING |
7 |
Brakes are fully released. Robot is ready for running a program. In Polyscope, the current safety mode is shown. |
UPDATING |
8 |
Firmware is being updated |
POWERING_OFF |
9 |
Robot arm is powering off |
ARM_BOOTING |
10 |
Robot arm is booting |
ARM_UPDATING |
11 |
Robot arm is being firmware updated |
Joint Modes
Same constants are used for Tool Mode.
Name |
Value |
Description |
|---|---|---|
RESET |
235 |
|
SHUTTING_DOWN |
236 |
|
BACKDRIVE |
238 |
|
POWER_OFF |
239 |
|
READY_FOR_POWER_OFF |
240 |
|
NOT_RESPONDING |
245 |
|
MOTOR_INITIALISATION |
246 |
|
BOOTING |
247 |
|
VIOLATION |
251 |
|
FAULT |
252 |
|
RUNNING |
253 |
|
IDLE |
255 |
Message Sources
Name |
Value |
Description |
Introduced in version |
|---|---|---|---|
JOINT_0_FPGA |
100 |
||
JOINT_0_A |
110 |
||
JOINT_0_B |
120 |
||
JOINT_1_FPGA |
101 |
||
JOINT_1_A |
111 |
||
JOINT_1_B |
121 |
||
JOINT_2_FPGA |
102 |
||
JOINT_2_A |
112 |
||
JOINT_2_B |
122 |
||
JOINT_3_FPGA |
103 |
||
JOINT_3_A |
113 |
||
JOINT_3_B |
123 |
||
JOINT_4_FPGA |
104 |
||
JOINT_4_A |
114 |
||
JOINT_4_B |
124 |
||
JOINT_5_FPGA |
105 |
||
JOINT_5_A |
115 |
||
JOINT_5_B |
125 |
||
TOOL_FPGA |
106 |
||
TOOL_A |
116 |
||
TOOL_B |
126 |
||
IMMI_FPGA |
107 |
||
IMMI_A |
117 |
||
IMMI_B |
127 |
||
TEACH_PENDANT_A |
108 |
||
TEACH_PENDANT_B |
118 |
||
BFB_FPGA |
109 |
||
BFB_A |
119 |
||
BFB_B |
129 |
||
ExtenderNear_FPGA |
70 |
||
ExtenderNear_MCU |
71 |
||
ExtenderFar_FPGA |
72 |
||
ExtenderFar_MCU |
73 |
||
SCB_FPGA |
40 |
||
UA |
20 |
||
UB |
30 |
||
ROBOTINTERFACE |
-2 |
||
RTMACHINE |
-3 |
||
SIMULATED_ROBOT |
-4 |
||
GUI |
-5 |
||
CONTROLLER |
7 |
||
RTDE |
8 |
||
LOGIC_PROGRAM |
13 |
10.14.0 |
Message Types
Name |
Value |
Description |
|---|---|---|
ROBOT_STATE |
16 |
|
ROBOT_MESSAGE |
20 |
|
MODBUS_INFO_MESSAGE |
5 |
|
PROGRAM_STATE_MESSAGE |
25 |
Safety Statuses
Name |
Value |
Description |
|---|---|---|
NORMAL |
1 |
|
REDUCED |
2 |
|
PROTECTIVE_STOP |
3 |
|
RECOVERY |
4 |
|
SAFEGUARD_STOP |
5 |
|
SYSTEM_EMERGENCY_STOP |
6 |
|
ROBOT_EMERGENCY_STOP |
7 |
|
VIOLATION |
8 |
|
FAULT |
9 |
|
VALIDATE_JOINT_ID |
10 |
|
UNDEFINED_SAFETY_MODE |
11 |
|
AUTOMATIC_MODE_SAFEGUARD_STOP |
12 |
|
SYSTEM_THREE_POSITION_ENABLING_STOP |
13 |
|
TP_THREE_POSITION_ENABLING_STOP |
14 |
|
IMMI_EMERGENCY_STOP |
15 |
|
IMMI_SAFEGUARD_STOP |
16 |
|
PROFISAFE_WAITING_FOR_PARAMETERS |
17 |
|
PROFISAFE_AUTOMATIC_MODE_SAFEGUARD_STOP |
18 |
|
PROFISAFE_SAFEGUARD_STOP |
19 |
|
PROFISAFE_EMERGENCY_STOP |
20 |
|
SAFETY_API_SAFEGUARD_STOP |
22 |
|
IO_PLANE_STOP |
23 |
Added in 10.13 |
Report Levels
Name |
Value |
Description |
|---|---|---|
DEBUG |
0 |
|
INFO |
1 |
|
WARNING |
2 |
|
VIOLATION |
3 |
|
FAULT |
4 |
|
CRITICAL_FAULT |
5 |
|
DEVL_DEBUG |
128 |
|
DEVL_INFO |
129 |
|
DEVL_WARNING |
130 |
|
DEVL_VIOLATION |
131 |
|
DEVL_FAULT |
132 |
|
DEVL_CRITICAL_FAULT |
133 |
Requested Types
Name |
Value |
Description |
|---|---|---|
BOOLEAN |
0 |
Simple yes/no */ |
INTEGER |
1 |
Integer |
FLOAT |
2 |
A script float (a double in c++/java) */ |
STRING |
3 |
Text string |
NONE |
8 |
Popup |
Robot Types
Name |
Value |
Description |
|---|---|---|
UNDEFINED |
0 |
|
UR5 |
1 |
Also UR7e |
UR10 |
2 |
Also UR12e |
UR3 |
3 |
UR3e |
UR16 |
4 |
UR16e |
UR18 |
5 |
UR18 |
UR8_LONG |
6 |
UR8 Long |
UR20 |
7 |
UR20 |
UR30 |
8 |
UR30 |
UR15 |
9 |
UR15 |
TP Types
Name |
Value |
Description |
|---|---|---|
NONE |
0 |
|
STANDARD |
1 |
|
THREE_POSITION_ENABLING |
2 |
Additional Resources
Product page for IMMI Module