8. Connections
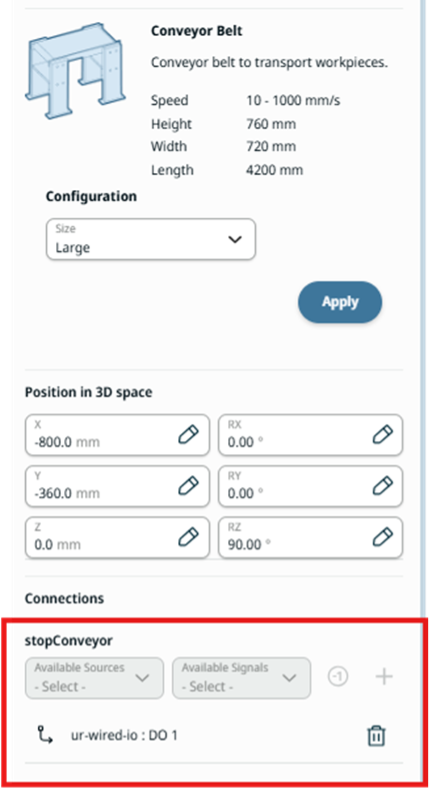
As an example, consider the conveyor:
By default, the conveyor exposes the stopConveyor action. When the configured signal is triggered, the conveyor stops. Signals can originate from sensors or the robot (e.g., UR-wired board digital output 1).
Configure your signal and click the + icon to add it.
Use the -1 icon to invert the signal state if needed.
Validate the configuration by running the simulation.
Automation on the conveyor