5. Navigation and Object Manipulation
5.1. Tree View and Gizmo Navigation
Select objects using the Tree View panel.
Use the Gizmo tool to move and orient objects.
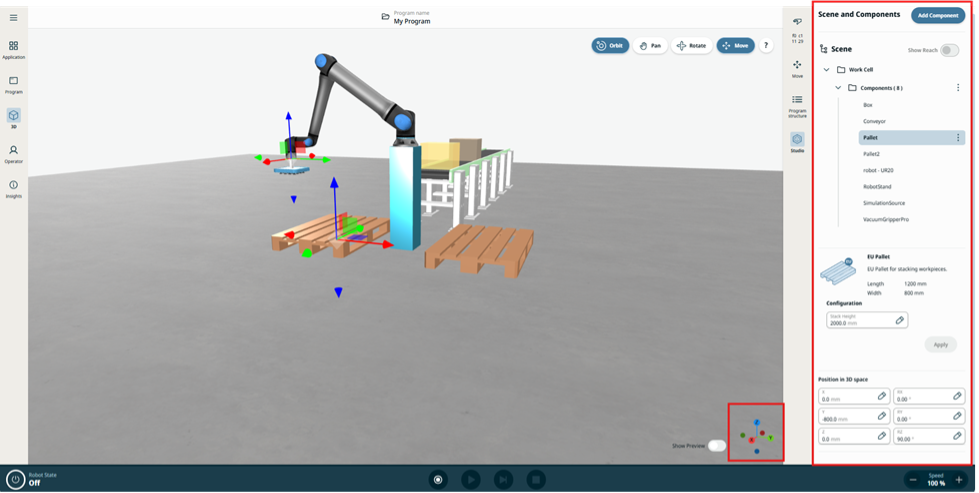
Gizmo and Tree View highlighted in red
5.2. Tree View Structure
In the Tree View, users can select items to display and edit their properties. Items in the Tree View can be deleted, renamed, and duplicated. Each item exposes different editable properties.
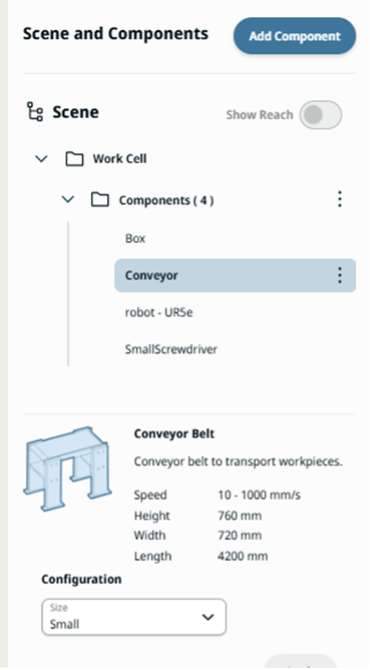
Tree View Structure
5.3. View Navigation
Use the Pan and Orbit buttons, or the corresponding keyboard shortcuts, to navigate the view.
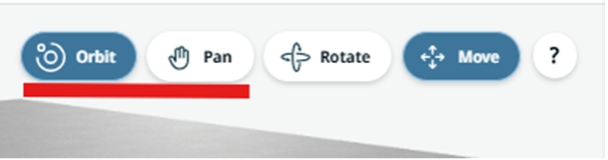
Orbit and Pan the view
Pan, Orbit view function and Rotate and Move elements
Adjust item positions using the Move and Rotate tools.
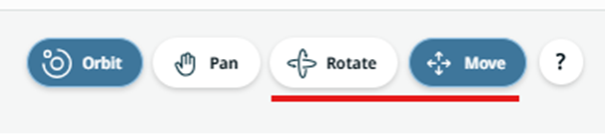
Move and Rotate tools
5.4. Reset Position
To reset the viewport, right-click on the scene and select Reset.
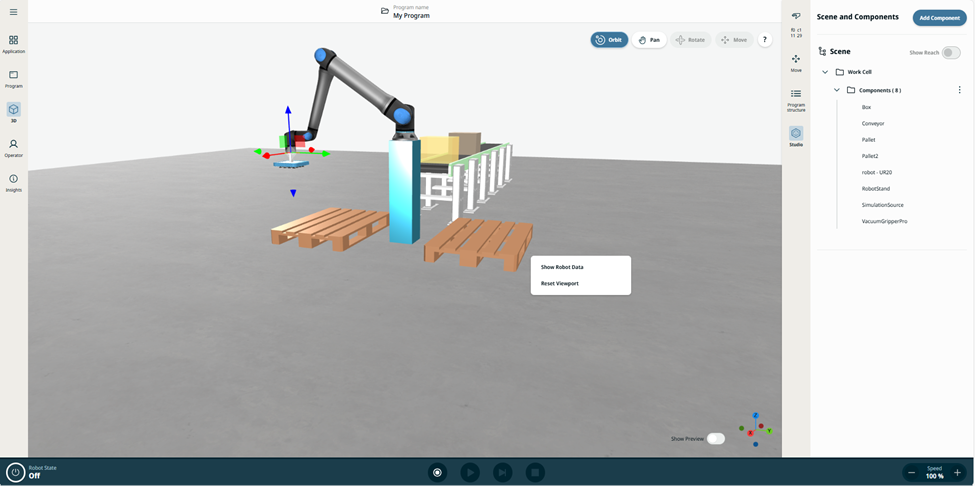
Reset viewport option when right clicking
5.5. Start the Simulation
There are several steps to start the simulation.
Change the Robot State to Active using the Robot State button in the bottom-left corner.
Change robot state
Enable Power On.
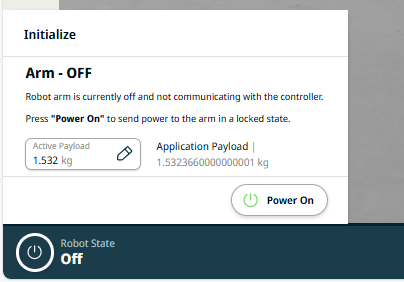
Power On button
Unlock.
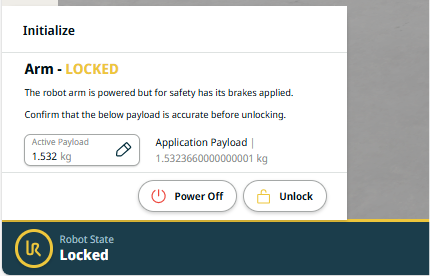
Unlock the robot
Once the robot is in the Active state, the conveyor starts moving, the physics engine is activated, and the simulation is ready to run.

Robot Active state
You can press Play to start the simulation.
Play and start the simulation
5.6. Jogging the Robot
When the robot state is Active, you can move the robot using free-drive by dragging the gizmo at the end of arm.
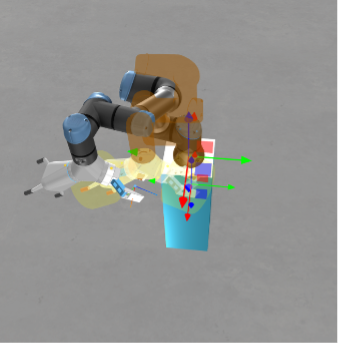
Free Jogging
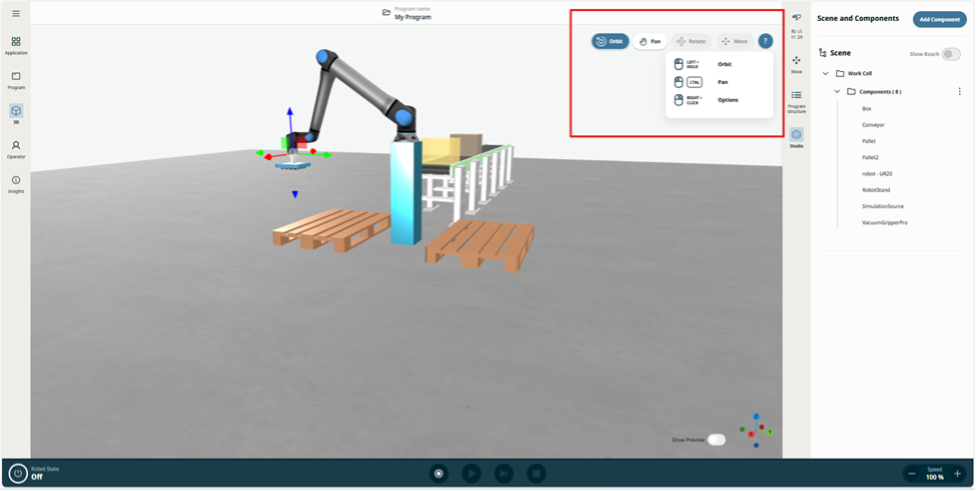
5.7. Pan Shortcuts
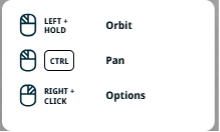
Shortcuts for navigating